پراکندگی و سابقه استفاده از سیستم های میراگر لرزه ای در دنیا
09 آوریل 2019| بانک مقالات| نویسنده: Ali.akhlagh |امروزه استفاده از سیستم های کنترل لرزه ای سازه ها برای بهبود رفتار لرزه ای سازه ها تحت بارگذاری های مختلف دینامیکی به یک تکنولوژی استاندارد بدل گشته است؛ گرچه هنوز روش های تحقیقاتی متعددی برای پیشبرد اثربخشی این روش ها وجود دارد. این گزارش به بررسی و مقایسه روش های مختلف این تکنولوژی که تا بدین روز ارائه گردید اند می پردازد. این سیستم ها را می توان براساس مکانیزم عملکردیشان به چهار دسته اصلی تقسیم کرد: (1) غیر فعال، (2) نیمه فعال، (3) فعال و (4) سیستم های ترکیبی. در ادامه مختصری از این چهار دسته اصلی و مقایسه آن ها شرح داده می شود. در این گزارش شما می توانید با کاربرد عملی این روش ها در کشور های پیشرو در زمینه کنترل لرزهای سازه ها نظیر ژاپن و ایالات متحده آمریکا آشنا شوید.
سیستم های کنترل لرزه ای
از سیستم های کنترل لرزه ای سازه ها می توان برای کاهش پاسخ سازه ها تحت بار های دینامیکی مختلف نظیر زلزله، باد، ترافیک و سایر بار های سرویس بهره گرفت. به طور کلی این دستگاه ها براساس مکانیزم عملکردیشان به چهار دسته تقسیم می شوند:
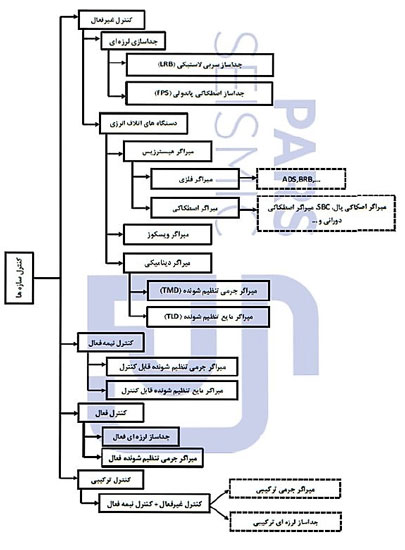
(1) سیستم کنترل غیرفعال
سیستم های کنترل غیرفعال از طریق اتلاف بخشی از انرژی ورودی به سازه به بهبود رفتار لرزه ای سازه کمک می کنند.
(2) سیستم کنترل نیمه فعال
سیستم های کنترل نیمه فعال شکل دیگری از میراگر های غیرفعال می باشند. آن ها معمولا به دلیل قابلیت تطبیق پذیری خود با سازه و بارگذاری وارده به آن، میراگر قابل کنترل یا هوشمند نیز تلقی می گردند. در این سیستم کنترلی در راستای بهبود عملکرد، سامانه تطبیق پذیر رفتار میراگر را براساس اطلاعات برداشت شده از بارگذاری وارده تنظیم می کند.
(3) سیستم کنترل فعال
علارغم بهره وری اقتصادی و قابلیت اعتماد سیستم های غیرفعال و نیمه فعال، این سیستم ها هوشمندی و ظرفیت محدودی برای کنترل ارتعاشات لرزه ای سازه ها دارند؛ که این امر منجربه ارائه سیستم های کنترل فعال گردید. این میراگر قابلیت اعمال نیرو به سازه به هنگام قرارگیری سازه تحت بارگذاری دینامیکی غیر قابل پیش بینی را برای کنترل ارتعاشات آن دارا می باشد.
(4) سیستم کنترل ترکیبی
همانطور که پیشتر اشاره گردید، سیستم های کنترلی فعال برای غلبه بر مشکلات محدودیت و هوشمندی سیستم های کنترلی غیرفعال و نیمه فعال ارائه گردیدند. عملکرد سیستم های کنترلی فعال به طور اساسی به نیروی خارجی وابسته است، که کاربرد آن ها را محدود و به یک سیستم آنالیز کننده سیگنال پیچیده و قوی نیازمند ساخته است، که تحقق این امر با هزینه گزافی رو به رو خواهد بود. دستگاه های کنترلی ترکیبی با ادغام سیستم های کنترلی مختلف به صورت سری یا موازی می تواند بر این مشکلات غلبه بکنند.
کاربرد سیستم های کنترلی مختلف در سازه ها
بنابه گزارش ایکِدا در سال 2004، پیشرفت و توسعه در زمینه کنترل ارتعاشات فعال و نیمه فعال سازه ها را در ژاپن می توان به چهار مرحله تقسیم بندی نمود. در گام اول که تا اواخر دهه 80 میلادی می باشد، مشخصات دینامیکی سیستم های کنترل فعال به طور تئوری و آزمایشگاهی از دیدگاه مهندسی شناخته شد. مرحله دوم در سال 1989 با اولین کاربرد دمپر فعال در ساختمان ها آغاز گردید. زلزله کوبه در سال 1995 کلید آغاز مرحله سوم در این زمینه بود؛ که قابلیت کنترل نیمه فعال سازه ها تحت زلزله های شدید را نشان داد. در نهایت گام چهارم با پایش سلامت سازه ها آغاز گردید. طبق گزارش ایکِدا از سال 1989 تا سال 2004، 53 پروژه کنترل شده توسط دمپر فعال و نیمه فعال در ژاپن ثبت گردیده است؛ که شامل 40 پروژه کنترلی فعال و 13 پروژه کنترلی نیمه فعال بوده است.
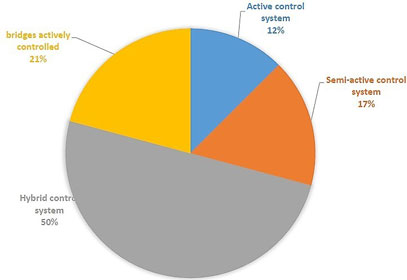
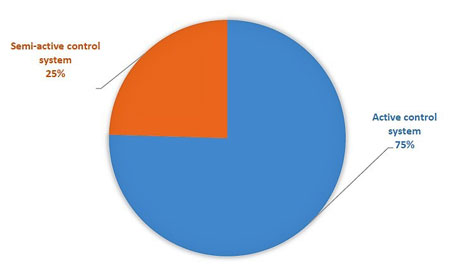
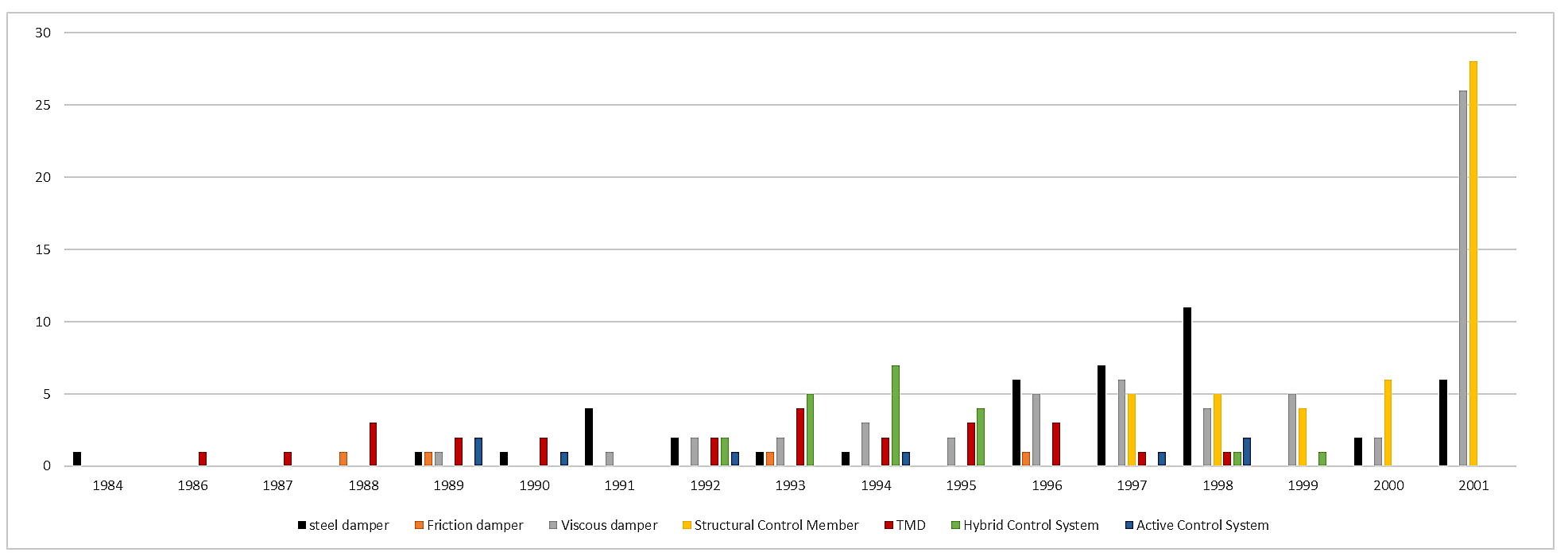
بار دیگر ایکِدا در سال 2009 گزارش خود را به روزرسانی کرد. وی گزارش کرد که از سال 1989 تا سال 2007، 53 پروژه از میراگر فعال و از سال 1990 تا سال 2006، 17 پروژه از میراگر نیمه فعال برای کنترل لرزه ای سازه شان بهره جسته اند. اسپنسر و ناگراجیا درسال 2003 لیستی از پروژه هایی که در بازه سال های 1989 تا 2002 از سیستم های کنترلی در ژاپن استفاده کرده اند تهیه کردند که در قالب نمودار مقابل قابل رویت می باشد.
کریم و همکاران در سال 1999 گزارشی مبنی بر ارائه تعداد نصب میراگر های مختلف در خلال دهه 90 میلادی در ژاپن منتشر کردند. گزارش آنها نشان می داد که تا بدان سال 28 درصد از سازه ها در ژاپن به میراگر فلزی مجهز شده اند. در ادامه میراگر های ترکیبی و میراگر ویسکوز به ترتیب با 19 و 17 درصد پراستفاده ترین میراگرها بوده اند. این در حالی بود که میراگر اصطکاکی، کم کاربرد ترین در میان میراگر ها بوده است.
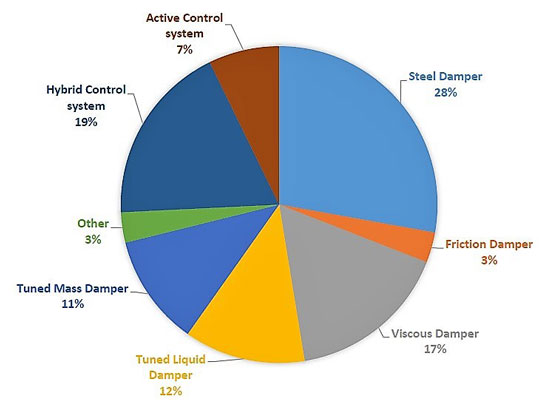
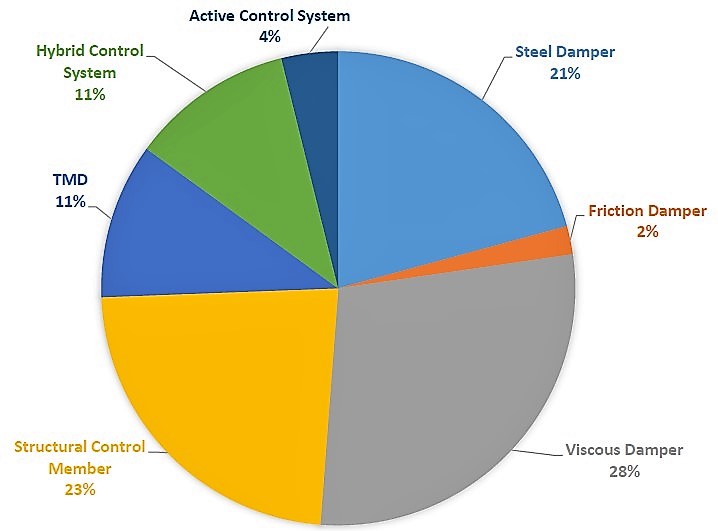
تراموتو در سال 2004 به بررسی 207 سازه در ژاپن و تفکیک سیستم استفاده شده در آن ها پرداخت، که نتایج تحقیقات وی در قالب نمودار های زیر قابل رویت می باشد. نتایج بررسی های تراموتو نشان داد که در کشور ژاپن از سال 1999 برخلاف آنچه که کریم و همکاران در سال 1999 گزارش کرده بودند استفاده از میراگر ویسکوز از میراگر فلزی پیشی گرفته و با 28 درصد استفاده در سازه های مختلف بیشترین سهم را به خود اختصاص داده است.
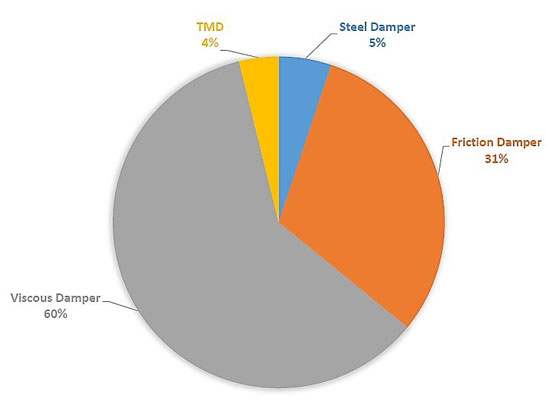
کنستانتینو و همکاران در سال 1998 جداولی از دمپر های غیرفعال استفاده شده در پروژه های مختلف در آمریکای شمالی تا بدان سال را گردآوری کردند. آن ها با گزارش خود نشان دادند که در آمریکای شمالی استفاده از میراگر ویسکوز با حضور شرکت های بزرگی چون Taylor devices، با 60 درصد استفاده در سازه های مختلف بیشترین کاربرد را در میان سایر میراگر ها دارد. استفاده از میراگر اصطکاکی نیز با حضور شرکت های بزرگی نظیر Pall dynamics و با سهم 31 درصدی خود پس از میراگر ویسکوز محبوب ترین دمپر می باشد.در آمریکای شمالی برخلاف کشور ژاپن که تا سال 1999 در آنجا نیز میراگر فلزی از محبوبیت بالایی برخوردار بودند، سهم میراگر فلزی تنها 3 درصد می باشد.
* استفاده از مطالب این صفحه با ذکر منبع و لینک مستقیم به آن، بلامانع است.



